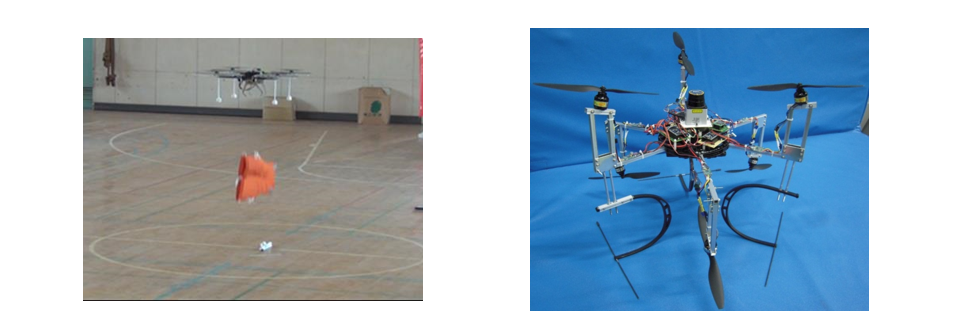
マルチローター型ドローンの開発
使用環境に最適なマルチローター型ドローンを研究開発しています。開発は形状のみならず,制御系や搭載計測器等も検討対象としています.図は河川の氾濫時に救命胴衣を落とす救命ドローンと傾かなくても平行移動できる機体です。
|
 |
|
 |
航空機の群制御
将来のドローンを中心とした自立航空機は群で使用されることが多くなると考えられます。そのような環境に対応するための群制御に関する研究を行っています。図は異なる機能を持つドローンを理想的な配置にする群制御のイメージ図です。
|
CMGの制御
衛星用姿勢制御デバイスの一つであるCMGの制御についての研究を行っています。研究対象としては,CMGの故障時における故障診断・自己修復制御や最短時間姿勢変更時における特異入力に関する調査等を扱っています。
|
 |
|
 |
デブリキャプチャ用超多リンク宇宙マニピュレータ
増え続ける宇宙デブリを捕まえるための宇宙マニピュレータに関する研究を行っています。小型軽量アクチュエータを使用することによりタコのような捕縛動作ができるシステムを提案し,運動・捕縛制御についての研究を行っています
|
Research outline
航空宇宙機の制御を中心としたシステムの開発を研究課題としています。
最適制御技術を背景に,人間の持つ曖昧さと航空宇宙機の融合や環境に合わせたシステムの開発等に関する研究行っています。
数値シミュレーションを中心に,マルチローター機,小型固定翼機等を用いた実験を行う研究も実施しています。
Contact