Development of multi-rotor type drones
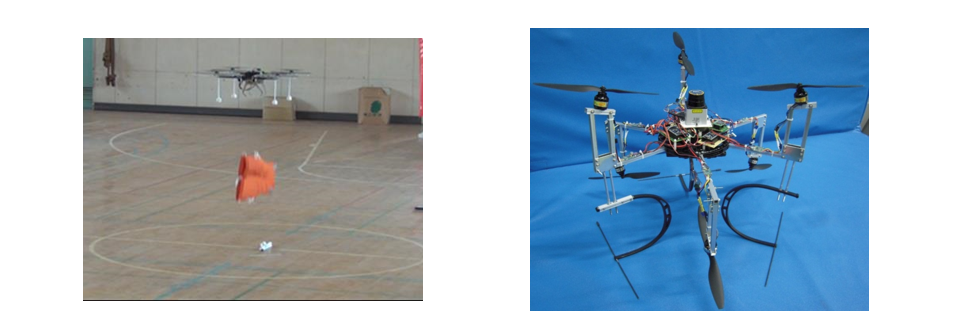
We study and develop the optimal multi-rotor type drones applying for specified environment. The development is not limited to the shape or structures, the control system and onboard sensors are treated as well. Figure shows the drone for rescue missions and the drone that can move around without tilting.
|
 |
|
 |
Formation flight of UAVs
Future autonomous UAVs including drones will be used as a group of vehicles working together. We study about the formation flight of the vehicles to realize the future systems. Figure is an image of optimal configuration of the vehicles with different abilities or on-board payloads.
|
CMG control
We study about CMGs which is one of the attitude control system for the satellites. Some of the targets of the studies are fault diagnosis and fault tolerant control for the CMGs with malfunctions, investigation of singular inputs for the optimal time attitude maneuvers.
|
 |
|
 |
Super multi-link space manipulator for debris capture
We study about the space manipulator to capture the increasing space debris. By applying the small light weight actuator, we propose octopus like debris capture system. The motion simulation and capturing simulations are studied in our lab.
|
Research outline
The main research in our lab is developing the integrated aerospace system based on the optimal and non-linear control theories.
With the background of optimal control theory, we aim to fuse the fuzziness of the human and crispness of the optimal control into an aerospace system which works well in designated environment.
We use the numerical simulations especially for studies treating satellites and experiments using multi-rotors and small fixed-wing crafts are held for developing advanced aeronautical systems.
Contact





